

Робот вуличного патрулювання та виявлення

особливості
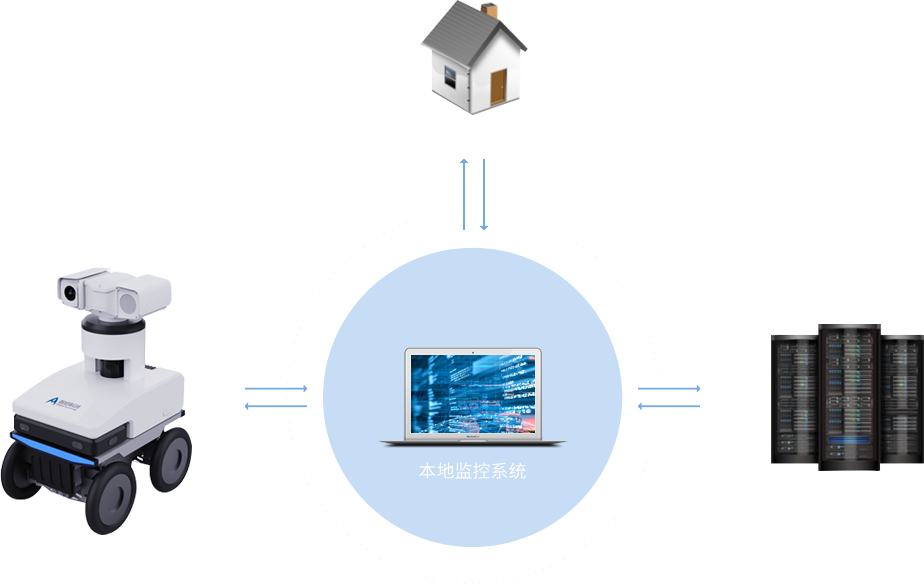
Автоматично виконувати завдання патрульної перевірки на підстанції та записувати інформацію про стан кожного пристрою.

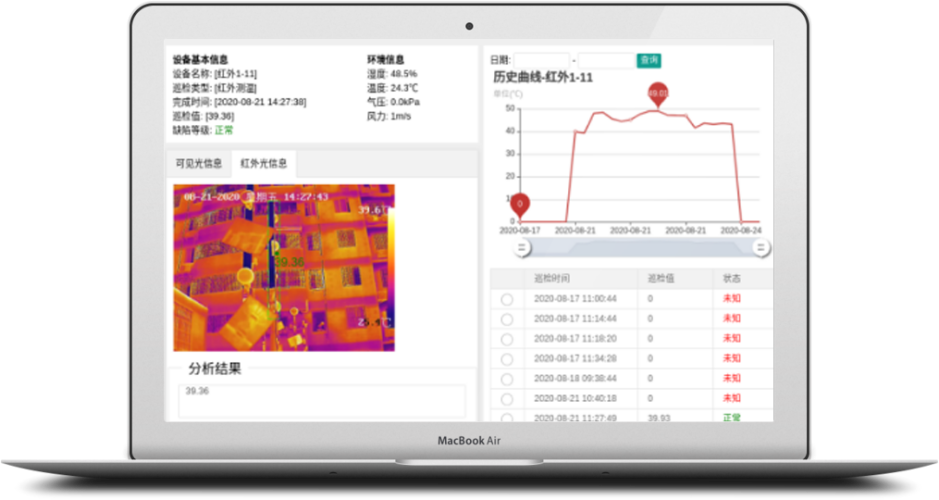
Автоматично аналізувати інформацію про обладнання та сигналізувати про аномальні умови
Технічні характеристики
| Розміри | 722*458*960 ( мм) |
| вага | 78 кг |
| Робоча потужність | 8h |
| Операційна Умови | Температура навколишнього середовища: від -10°C до 60°C/кімн вологість: <99%;Ступінь захисту: IP55; працює в дощові дні |
| Роздільна здатність у видимому світлі Інфрачервона роздільна здатність | 1920 x 1080/30-кратне оптичне збільшення |
| Режим навігації | 640 x 480/Точність>0,5°C |
| Режим переміщення | 3D LIDAR безтрекова навігація, автоматичне уникнення перешкод |
| Максимальна швидкість руху | Кермування при русі прямо і марші вперед;кермування на місці;переклад, паркування 1,2 м/с (Примітка: максимальна швидкість руху в дистанційному режимі) |
| Максимальна відстань для паркування | 0,5 м (Примітка: максимальний гальмівний шлях при швидкості руху 1 м/с) |
| датчик | Камера видимого світла, інфрачервоний тепловізор, пристрій збору шумів, додатковий розподілений пристрій визначення температури та вологості та моніторинг часткового розряду AIS |
| Режим керування | Повністю автоматичне/дистанційне керування повністю автоматичне/дистанційне керування |
Застосовні сценарії

Випадки застосування
