

Le robot extérieur de patrouille et de détection

Caractéristiques
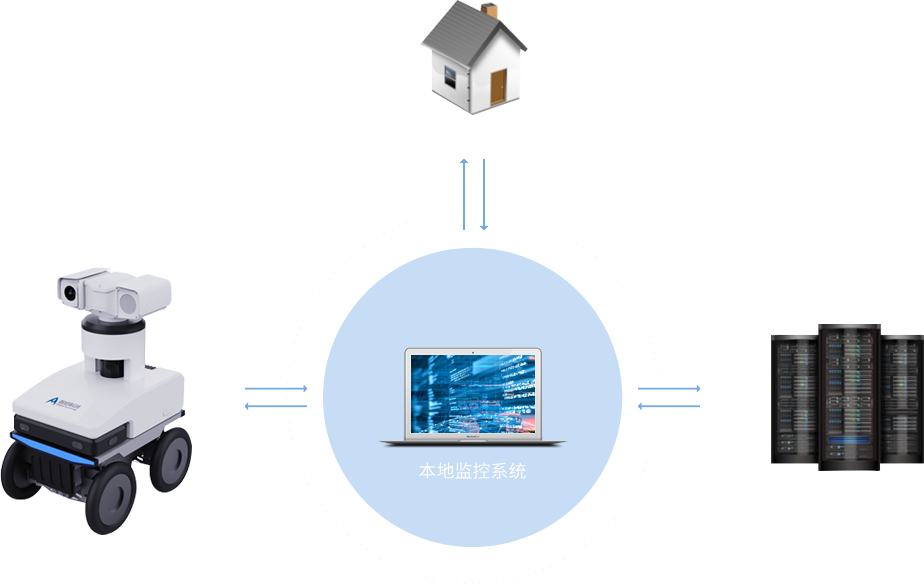
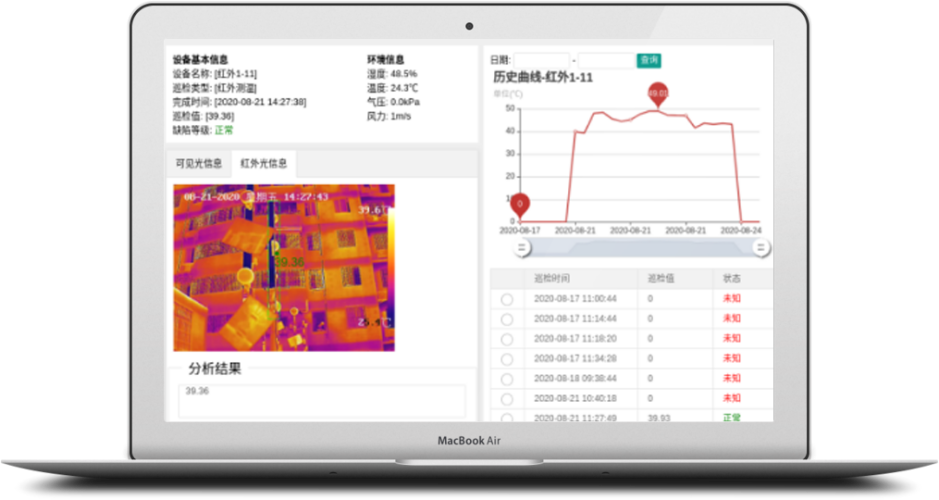
Implémentez automatiquement les tâches d'inspection de patrouille dans la sous-station et enregistrez les informations d'état de chaque appareil.

Analyser automatiquement les informations de l'équipement et alerter en cas de conditions anormales
Caractéristiques
| Dimensions | 722*458*960 (mm) |
| Lester | 78kg |
| Puissance de fonctionnement | 8h |
| en fonctionnement Conditions | Température ambiante : -10°C à 60°C/Ambiante humidité : <99 % ;Indice de protection : IP55 ; utilisable les jours de pluie légère |
| Résolution de la lumière visible Résolution infrarouge | Zoom optique 1920 x 1080/30X |
| Mode Navigation | 640 x 480/Précision>0.5°C |
| Mode de déplacement | Navigation sans piste LIDAR 3D, évitement automatique des obstacles |
| Vitesse de conduite maximale | Diriger en allant tout droit et en marchant vers l'avant ;direction en place ;translation, stationnement 1,2 m/s (Remarque : vitesse de conduite maximale en mode distant) |
| Distance de stationnement maximale | 0,5 m (Remarque : distance de freinage maximale à une vitesse de déplacement de 1 m/s) |
| Capteur | Caméra à lumière visible, imageur infrarouge thermique, dispositif de collecte de bruit, dispositif de détection de température et d'humidité distribué en option et surveillance des décharges partielles AIS |
| Mode de contrôle | Entièrement automatique/télécommande entièrement automatique/télécommande |
Scénarios applicables

Cas d'application
