
Роботот за метење на отворено
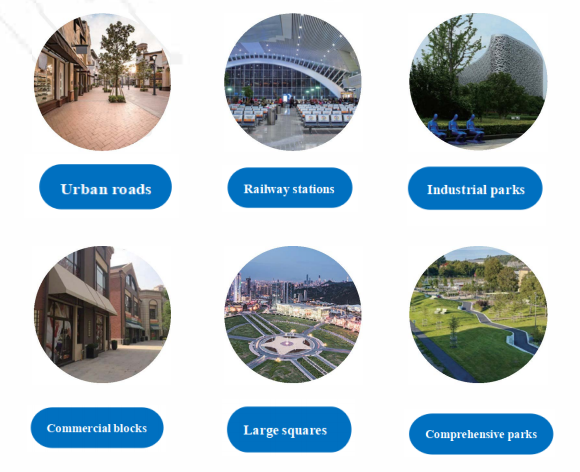
Со комбинирање на LIDAR, камера, GNSS модул, модул IMU и други сензори, роботот за чистење без екипаж може автоматски и интелигентно да планира задачи и да го заврши чистењето, прскањето и собирањето ѓубре за да ја минимизира работата на работниците во санитарната служба.Може да се користи во градските помошни ленти, секундарни главни патишта, главни патишта, плоштади, паркови, индустриски паркови, аеродроми и плоштади на железничка станица со голема брзина.

Апликативни сценарија
Техничка спецификација

Карактеристики
Спецификации
| Ширина на чистење | 140 см |
| Работен Еефикасност | 4500 m²/h |
| Севкупни димензии | 1865mm*1040mm*1913mm |
| Маса | 750 кг |
| Максимална брзина | 6 км/ч |
| Капацитет за качување | Максимум 15° |
| Работно време | 5-8ч |
| Капацитет на резервоарот за ѓубре | 150 л |
| Капацитет на резервоар за вода | 55 л |
Случаи за апликација

Случаи за апликација
